Projects
Autonomous Mars Sample Return Rover
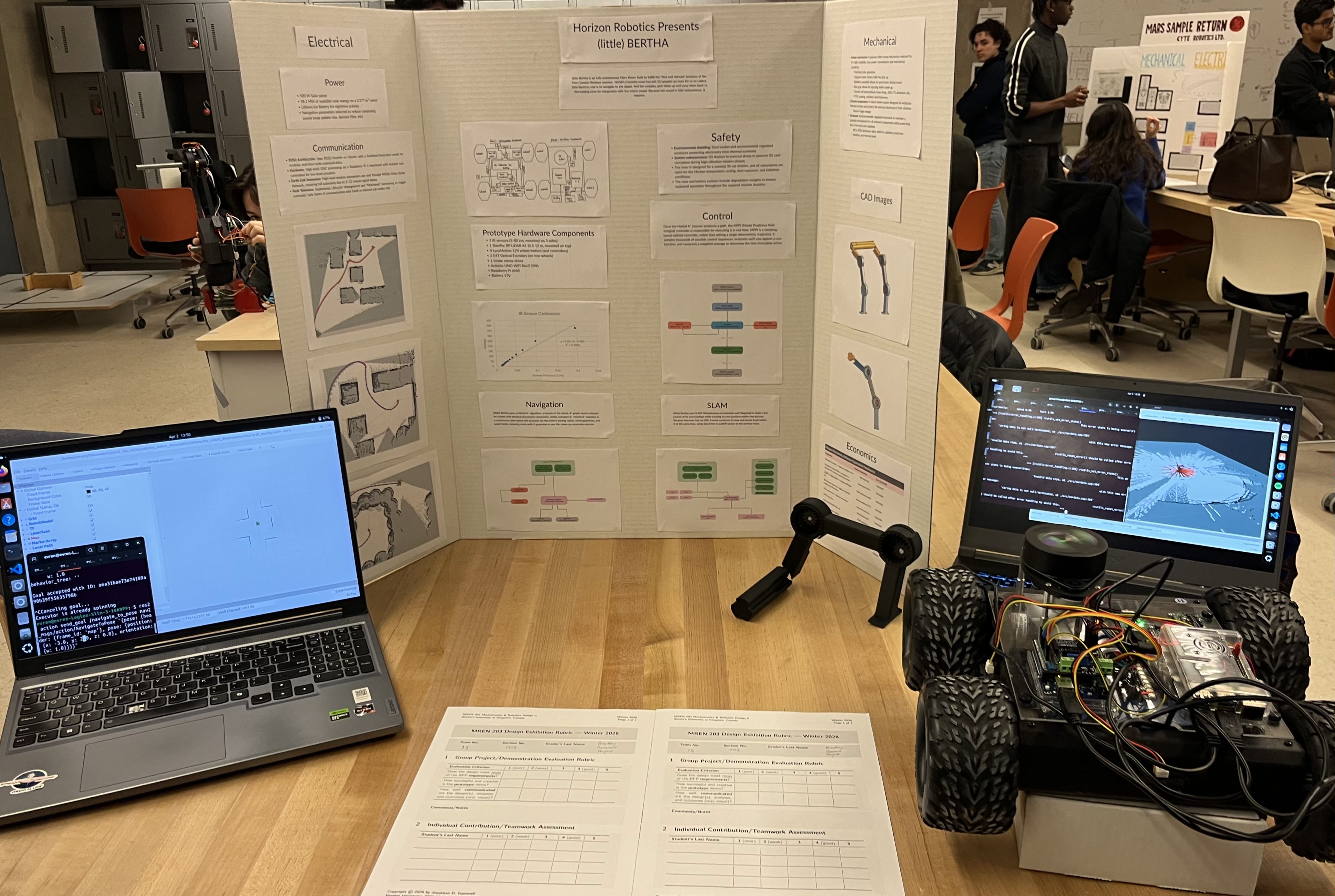
The Mars Sample Return Rover project focuses on the design and development of an autonomous robotic system capable of navigating unstructured terrain and retrieving sample tubes with high reliability. The system integrates a mechanically simple yet robust roller-based intake mechanism optimized for low power consumption and debris tolerance, using lightweight, durable materials and protective design features to ensure performance in harsh environments. Autonomy is achieved through a tightly coupled guidance, navigation, and control architecture, combining wheel odometry and LIDAR-based SLAM for state estimation and mapping, alongside a layered path planning framework that uses global and local algorithms to adapt to dynamic obstacles. Additional short-range sensing enhances near-field obstacle detection, while closed-loop PI control enables accurate velocity tracking. Overall, the project demonstrates strong system-level integration of nechanical design, perception, and autononous navigation to achieve reliable sample acquisition and transport.
PCB Spiral NFC Business Card
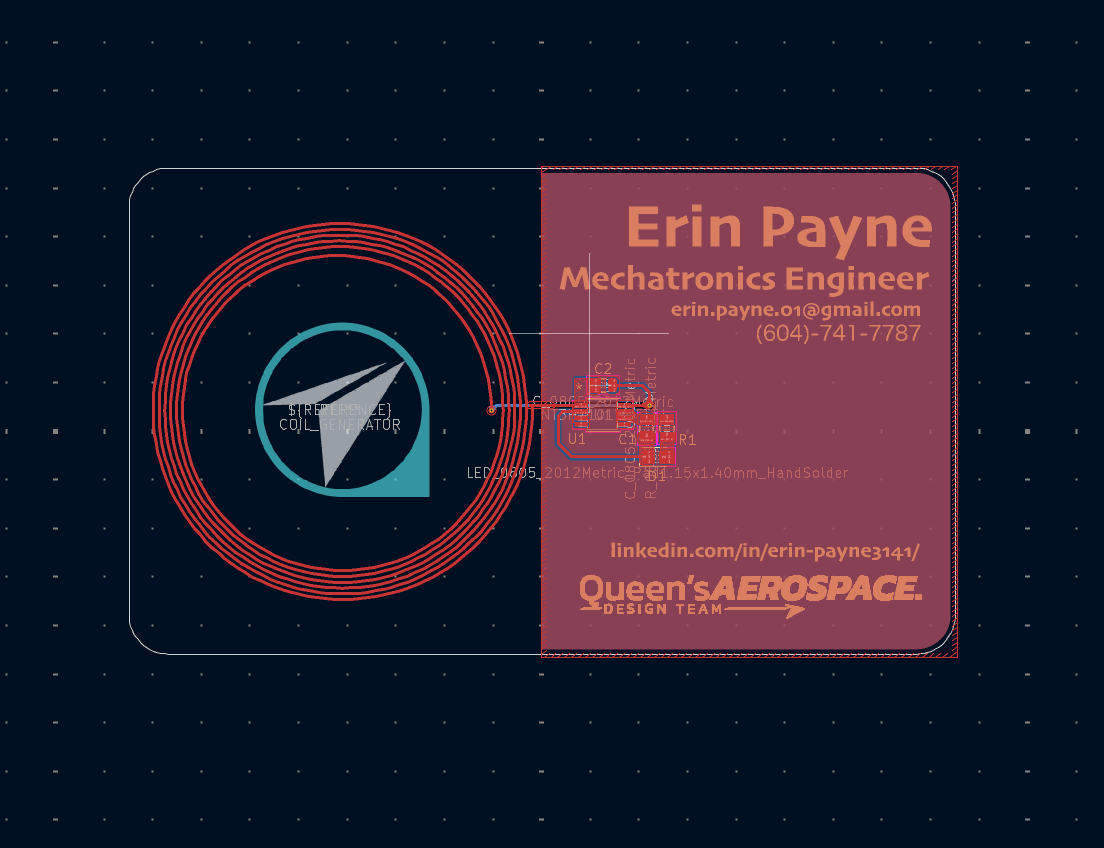
Designed and fabricated a custom PCB with a spiral NFC antenna, a geometry that enables near-field communication without a battery. Tap it to any phone and your contact information loads instantly. Demanded deep understanding of antenna geometry, impedance matching, and the gap between schematic and working hardware.
Stewart (Hexapod) Platform
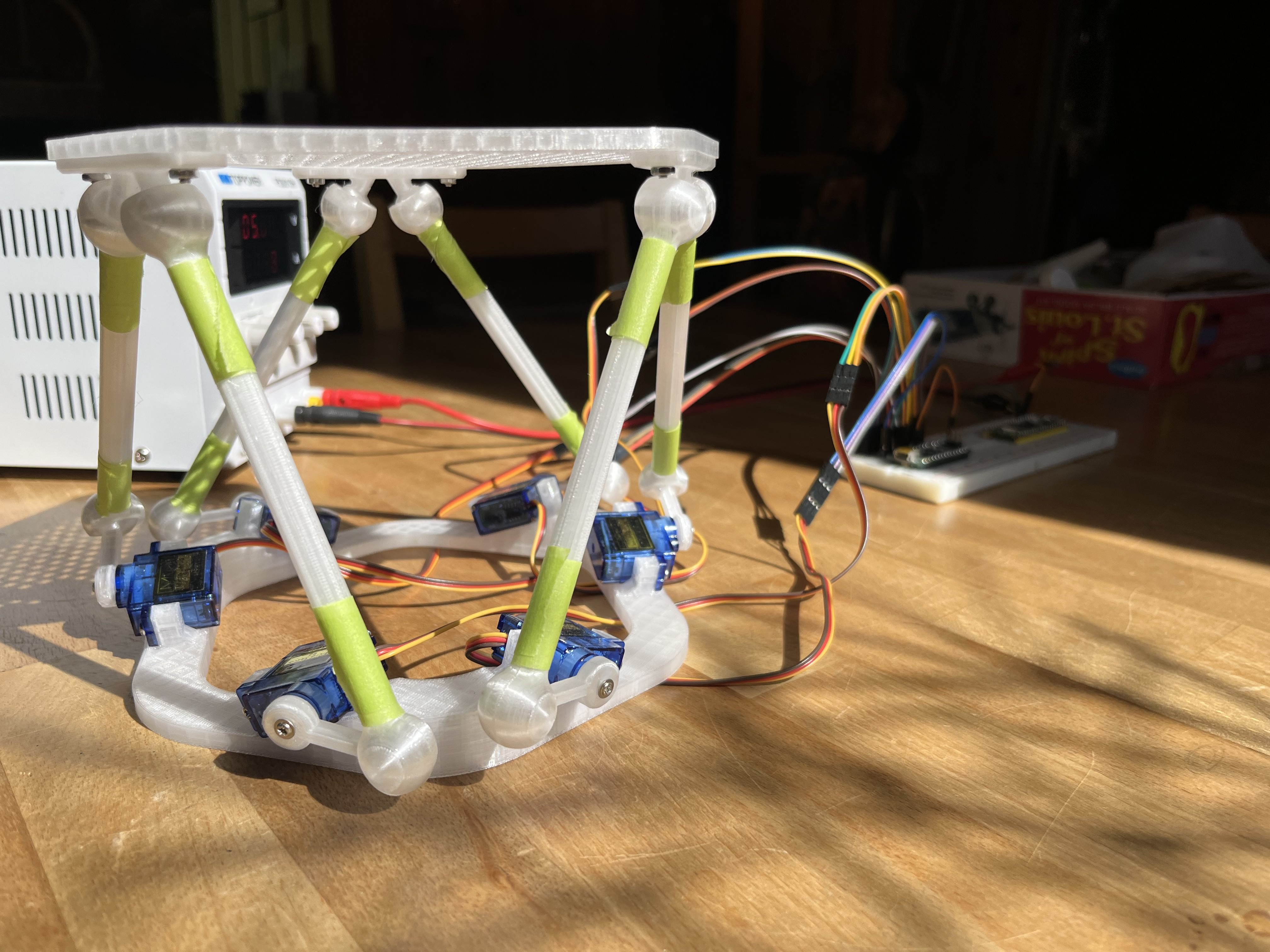
I designed, 3D-modelled, and fabricated a 6-DOF Stewart platform using FreeCAD, iterating on linkage geometry to maximize motion range and structural rigidity. Additionally, I developed the C++ code for an Arduino-based controller and a laptop user interface to coordinate the simultaneous movement of six high-torque servos.
Drone PID Tuning
I developed a structured protocol to tune and calibrate PID parameters in QGroundControl, specifically isolating issues such as rate-gain imbalance and sensor noise. By refining rate and attitude loops through parameter sweeps, I successfully reduced oscillations to achieve smoother, more predictable flight behavior and improved airframe safety during testing.
